Functions¶
Create a tensor-product grid
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22def tensorgrid(x, y): """ tensorgrid(x, y) Create a tensor grid for a rectangle from its 1d projections x and y. Returns a function to reshape a 2d array to a vector, a function to reshape a vector into a 2d array, a function to evaluate a function on the grid, two arrays to give the grid coordinates, and a boolean array to identify the boundary points. """ m, n = len(x) - 1, len(y) - 1 vec = lambda U: U.T.flatten() unvec = lambda u: np.reshape(u, (n+1, m+1)).T mtx = lambda h: np.array([[h(xi ,yj) for yj in y] for xi in x]) X = mtx(lambda x, y: x) Y = mtx(lambda x, y: y) # Identify boundary points. is_boundary = np.tile(True, (m+1, n+1)) is_boundary[1:-1, 1:-1] = False return mtx, X, Y, vec, unvec, is_boundary
Solution of Poisson’s equation by finite differences
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35def poissonfd(f, g, m, xspan, n, yspan): """ poissonfd(f, g, m, xspan, n, yspan) Solve Poisson's equation on a rectangle by finite differences. Function f is the forcing function and function g gives the Dirichlet boundary condition. The rectangle is the tensor product of intervals xspan and yspan, and the discretization uses m+1 and n+1 points in the two coordinates. Return matrices of the solution values, and the coordinate functions, on the grid. """ # Discretize the domain. x, Dx, Dxx = diffmat2(m, xspan) y, Dy, Dyy = diffmat2(n, yspan) mtx, X, Y, vec, unvec, is_boundary = tensorgrid(x, y) N = (m+1) * (n+1) # total number of unknowns # Form the collocated PDE as a linear system. Dxx = sp.lil_matrix(Dxx) Dyy = sp.lil_matrix(Dyy) A = sp.kron(sp.eye(n+1, format="lil"), Dxx) + sp.kron(Dyy, sp.eye(m+1, format="lil")) b = vec(mtx(f)) # Apply Dirichlet condition. idx = vec(is_boundary) scale = np.max(abs(A[n+1, :])) I = sp.eye(N, format="lil") A[idx, :] = scale * I[idx, :] # Dirichet assignment X_bd, Y_bd = vec(X)[idx], vec(Y)[idx] b[idx] = scale * g(X_bd, Y_bd) # assigned values # Solve the linear sytem and reshape the output. u = scipy.sparse.linalg.spsolve(A.tocsr(), b) U = unvec(u) return U, X, Y
Solution of elliptic PDE by Chebyshev collocation
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37def elliptic(f, g, m, xspan, n, yspan): """ newtonpde(f, g, m, xspan, n, yspan) Newton's method with finite differences to solve the PDE f(u,x,y,disc)=0 on the rectangle xspan \times yspan, subject to g(x,y)=0 on the boundary. Use m+1 points in x by n+1 points in y. Return matrices of the solution values, and the coordinate functions, on the grid. """ from scipy.sparse.linalg import spsolve x, Dx, Dxx = diffcheb(m, xspan) y, Dy, Dyy = diffcheb(n, yspan) mtx, X, Y, vec, unvec, is_boundary = tensorgrid(x, y) # Evaluate the boundary condition at the boundary nodes. idx = vec(is_boundary) X_bd, Y_bd = vec(X)[idx], vec(Y)[idx] g_bd = g(X_bd, Y_bd) # Evaluate the PDE+BC residual. def residual(u): U = unvec(u) R = f(X, Y, U, Dx @ U, Dxx @ U, U @ Dy.T, U @ Dyy.T) # PDE r = vec(R) r[idx] = u[idx] - g_bd # BC return r # Solve the equation. u = levenberg(residual, vec(np.zeros(X.shape)))[-1] U = unvec(u) def evaluate(xi, eta): v = [chebinterp(y, u, eta) for u in U] return chebinterp(x, v, xi) return np.vectorize(evaluate)
Examples¶
13.1 Tensor-product discretizations¶
Example 13.1.2
Here is the grid from Example 13.1.1.
m = 4
x = linspace(0, 2, m+1)
n = 2
y = linspace(1, 3, n+1)For a given we can find by using a comprehension syntax.
f = lambda x, y: cos(pi * x * y - y)
F = array( [ [f(xi, yj) for yj in y] for xi in x ] )
print(F)[[ 0.54030231 -0.41614684 -0.9899925 ]
[ 0.84147098 0.41614684 -0.14112001]
[-0.54030231 -0.41614684 0.9899925 ]
[-0.84147098 0.41614684 0.14112001]
[ 0.54030231 -0.41614684 -0.9899925 ]]
We can make a nice plot of the function by first choosing a much finer grid. However, the contour and surface plotting functions expect the transpose of mtx().
Tip
To emphasize departures from a zero level, use a colormap such as RdBu and set the color limits to be symmetric around zero.
m, n = 80, 70
x = linspace(0, 2, m+1)
y = linspace(1, 3, n+1)
mtx, X, Y, _, _, _ = FNC.tensorgrid(x, y)
F = mtx(f)
pcolormesh(X.T, Y.T, F.T, cmap="RdBu", vmin=-1, vmax=1, shading="gouraud")
axis("equal"), colorbar()
xlabel("$x$"), ylabel("$y$");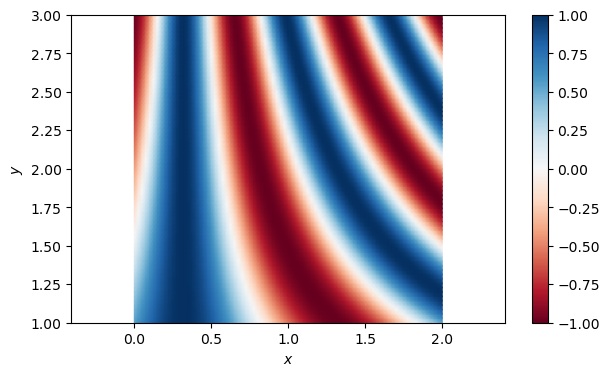
Example 13.1.3
For a function given in polar form, such as , construction of a function over the unit disk is straightforward using a grid in space.
r = linspace(0, 1, 41)
theta = linspace(0, 2*pi, 121)
mtx, R, Theta, _, _, _ = FNC.tensorgrid(r, theta)
F = mtx(lambda r, theta: 1 - r**4)
contourf(R.T, Theta.T, F.T, levels=20)
colorbar()
xlabel("$r$"), ylabel("$\\theta$");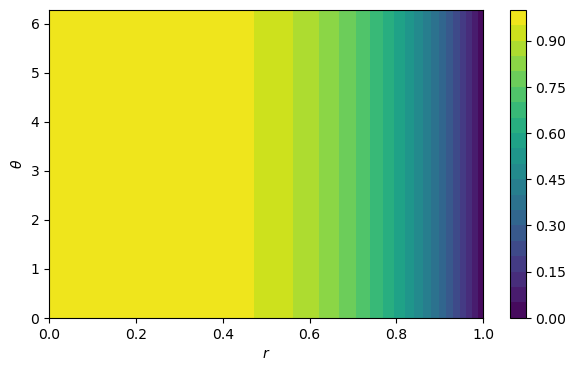
Of course, we are used to seeing such plots over the plane, not the plane. For this we create matrices for the coordinate functions and .
X, Y = R * cos(Theta), R * sin(Theta)
contourf(X.T, Y.T, F.T, levels=20)
colorbar(), axis("equal")
xlabel("$x$"), ylabel("$y$");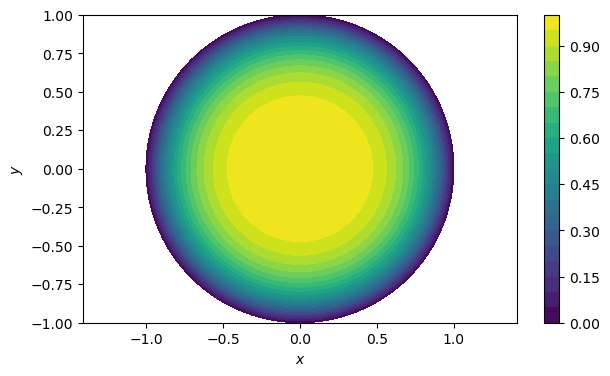
In such functions the values along the line must be identical, and the values on the line should be identical to those on . Otherwise the interpretation of the domain as the unit disk is nonsensical. If the function is defined in terms of and , then those can be defined in terms of and using (13.1.5).
Example 13.1.4
We define a function and, for reference, its two exact partial derivatives.
u = lambda x, y: sin(pi * x * y - y)
du_dx = lambda x, y: pi * y * cos(pi * x * y - y)
du_dy = lambda x, y: (pi * x - 1) * cos(pi * x * y - y)We will use an equispaced grid and second-order finite differences as implemented by diffmat2. First, we have a look at a plots of the exact partial derivatives.
m, n = 80, 70
x, Dx, Dxx = FNC.diffmat2(m, [0, 2])
y, Dy, Dyy = FNC.diffmat2(n, [1, 3])
mtx, X, Y, _, _, _ = FNC.tensorgrid(x, y)
U = mtx(u)
dU_dX = mtx(du_dx)
dU_dY = mtx(du_dy)
subplot(1, 2, 1)
contourf(X, Y, dU_dX)
title("$u$"), axis("equal")
subplot(1, 2, 2)
contourf(X, Y, dU_dY)
title("$\\partial u/\\partial y$"), axis("equal");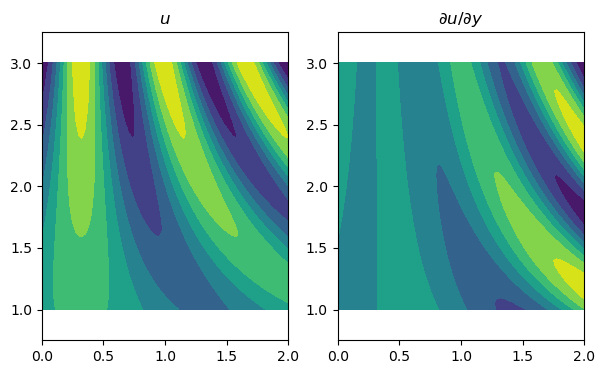
Now we compare the exact partial derivatives with their finite-difference approximations. Since these are signed errors, we use a colormap that is symmetric around zero.
subplot(1, 2, 1)
err_x = Dx @ U - dU_dX
M = max(abs(err_x))
pcolormesh(X, Y, err_x, shading="gouraud", cmap="RdBu", vmin=-M, vmax=M)
colorbar()
title("error in $\\partial u/\\partial x$"), axis("equal")
subplot(1, 2, 2)
err_y = U @ Dy.T - dU_dY
M = max(abs(err_y))
pcolormesh(X, Y, err_y, shading="gouraud", cmap="RdBu", vmin=-M, vmax=M)
colorbar()
title("error in $\\partial u/\\partial y$"), axis("equal");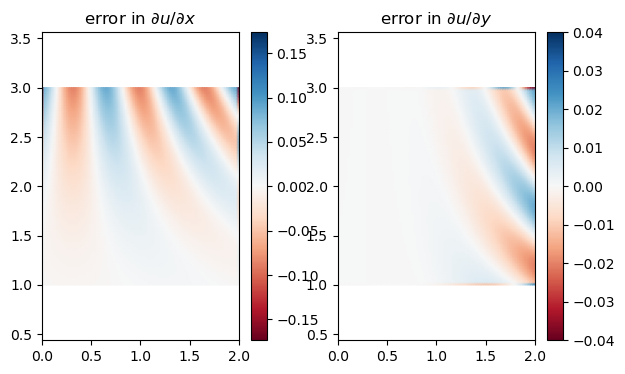
Not surprisingly, the errors are largest where the derivatives themselves are largest.
13.2 Two-dimensional diffusion and advection¶
Example 13.2.1
m, n = 4, 3
x = linspace(0, 2, m+1)
y = linspace(-3, 0, n+1)
f = lambda x, y: cos(0.75 * pi * x * y - 0.5 * pi * y)
mtx, X, Y, vec, unvec, _ = FNC.tensorgrid(x, y)
F = mtx(f)
print(f"function on a {m}x{n} grid:")
with printoptions(precision=4, suppress=True):
print(F)
print("vec(F):")
with printoptions(precision=4, suppress=True):
print(vec(F))function on a 4x3 grid:
[[-0. -1. 0. 1. ]
[ 0.3827 0.7071 0.9239 1. ]
[-0.7071 0. 0.7071 1. ]
[ 0.9239 -0.7071 -0.3827 1. ]
[-1. 1. -1. 1. ]]
vec(F):
[-0. 0.3827 -0.7071 0.9239 -1. -1. 0.7071 0. -0.7071
1. 0. 0.9239 0.7071 -0.3827 -1. 1. 1. 1.
1. 1. ]
The unvec operation is the inverse of vec.
print("unvec(vec(F)):")
with printoptions(precision=4, suppress=True):
print(unvec(vec(F)))unvec(vec(F)):
[[-0. -1. 0. 1. ]
[ 0.3827 0.7071 0.9239 1. ]
[-0.7071 0. 0.7071 1. ]
[ 0.9239 -0.7071 -0.3827 1. ]
[-1. 1. -1. 1. ]]
Example 13.2.2
We start by defining the discretization of the rectangle.
m, n = 60, 40
x, Dx, Dxx = FNC.diffper(m, [-1, 1])
y, Dy, Dyy = FNC.diffper(n, [-1, 1])
mtx, X, Y, vec, unvec, _ = FNC.tensorgrid(x, y)Here is the initial condition, evaluated on the grid.
u_init = lambda x, y: sin(4 * pi * x) * exp(cos(pi * y))
U0 = mtx(u_init)
mx = max(abs(U0))
pcolormesh(X, Y, U0, vmin=-mx, vmax=mx, cmap="RdBu", shading="gouraud")
axis("equal"), colorbar()
xlabel("$x$"), ylabel("$y$")
title("Initial condition");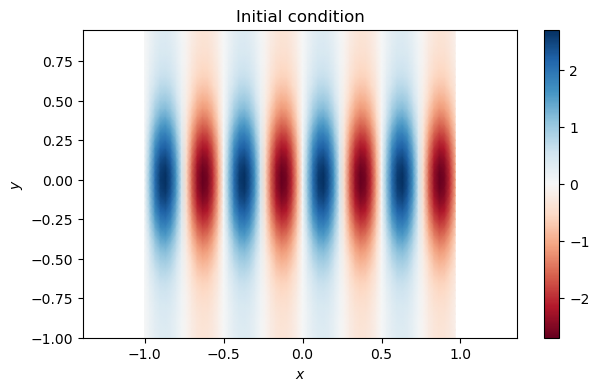
The following function computes the time derivative for the unknowns, which have a vector shape. The actual calculations, however, take place using the matrix shape.
alpha = 0.1
def du_dt(t, u):
U = unvec(u)
Uyy = Dxx @ U
Uxx = U @ Dyy.T
dU_dt = alpha * (Uxx + Uyy) # PDE
return vec(dU_dt)Since this problem is parabolic, a stiff time integrator is appropriate.
from scipy.integrate import solve_ivp
sol = solve_ivp(du_dt, (0, 0.2), vec(U0), method="BDF", dense_output=True)
U = lambda t: unvec(sol.sol(t))We can use the function U defined above to get the solution at any time. Its output is a matrix of values on the grid.
Tip
To plot the solution at any time, we use the same color scale as with the initial condition, so that the pictures are more easily compared.
pcolormesh(X.T, Y.T, U(0.02).T,
vmin=-mx, vmax=mx, cmap="RdBu", shading="gouraud")
axis("equal"), colorbar()
xlabel("$x$"), ylabel("$y$")
title("Heat equation, t=0.02");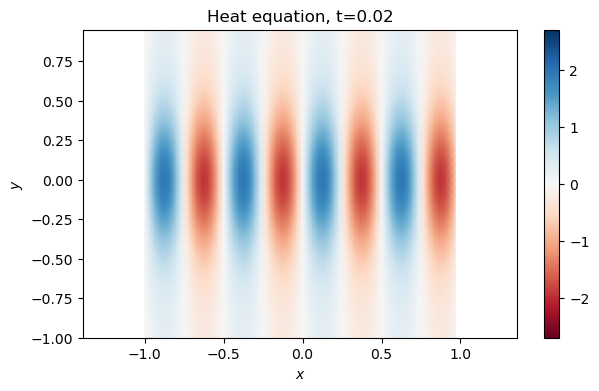
An animation shows convergence toward a uniform value.
from matplotlib import animation
fig, ax = subplots()
obj = ax.pcolormesh(X, Y, U(0), vmin=-mx, vmax=mx, cmap="RdBu", shading="gouraud")
time_text = ax.text(0.05, 0.9, '', transform=ax.transAxes)
ax.set_xlabel("$x$"), ax.set_ylabel("$y$")
ax.set_aspect("equal")
ax.set_title("Heat equation on a periodic domain")
def snapshot(t):
global obj
obj.remove()
obj = ax.pcolormesh(X, Y, U(t), vmin=-mx, vmax=mx, cmap="RdBu", shading="gouraud")
time_text.set_text(f"t = {t:.2f}")
anim = animation.FuncAnimation(fig, snapshot, frames=linspace(0, 0.2, 41))
anim.save("heat-2d.mp4", fps=30)
close()Example 13.2.3
The first step is to define a discretization of the domain.
m, n = 50, 36
x, Dx, Dxx = FNC.diffcheb(m, [-1, 1])
y, Dy, Dyy = FNC.diffcheb(n, [-1, 1])
mtx, X, Y, _, _, _ = FNC.tensorgrid(x, y)
u_init = lambda x, y: (1 + y) * (1 - x)**4 * (1 + x)**2 * (1 - y**4)We define functions extend and chop to deal with the Dirichlet boundary conditions.
def chop(U):
return U[1:-1, 1:-1]
def extend(W):
U = zeros((m+1, n+1))
U[1:-1, 1:-1] = W
return UNow we define the pack and unpack functions, using another call to Algorithm 13.2.1 to get reshaping functions for the interior points.
_, _, _, vec, unvec, _ = FNC.tensorgrid(x[1:-1], y[1:-1])
pack = lambda U: vec(chop(U)) # restrict to interior, then vectorize
unpack = lambda w: extend(unvec(w)) # reshape, then extend to boundaryNow we can define and solve the IVP using a stiff solver.
ep = 0.05
def dw_dt(t, w):
U = unpack(w)
Uyy = Dxx @ U
Uxx = U @ Dyy.T
dU_dt = 1 - Dx @ U + ep * (Uxx + Uyy)
return pack(dU_dt)
U0 = mtx(u_init)
sol = solve_ivp(dw_dt, (0, 2), pack(U0), method="BDF", dense_output=True)When we evaluate the solution at a particular value of , we get a vector of the interior grid values. The unpack converts this to a complete matrix of grid values.
U = lambda t: unpack(sol.sol(t)) # matrix-valued function of time
pcolormesh(X.T, Y.T, U(0.5).T, cmap="Blues", shading="gouraud")
colorbar()
xlabel("$x$"), ylabel("$y$")
axis("equal"), title("Solution at t=0.5");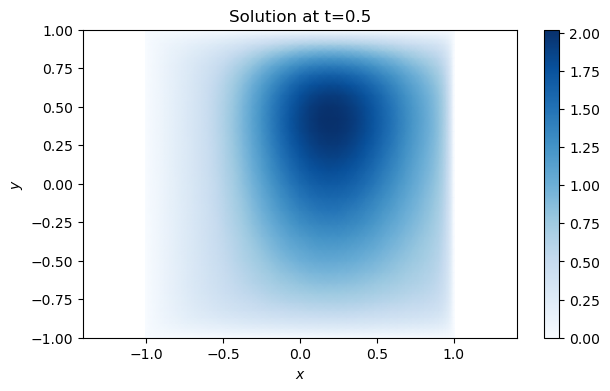
mx = max([max(U(t)) for t in linspace(0, 2, 21)])
fig, ax = subplots()
obj = ax.pcolormesh(X.T, Y.T, U(0).T, vmin=0, vmax=2, cmap="Blues", shading="gouraud")
time_text = ax.text(0.05, 0.9, '', transform=ax.transAxes)
ax.set_xlabel("$x$"), ax.set_ylabel("$y$")
ax.set_aspect("equal")
ax.set_title("Advection-diffusion in 2d")
def snapshot(t):
global obj
obj.remove()
obj = ax.pcolormesh(X.T, Y.T, U(t).T, vmin=0, vmax=mx, cmap="Blues", shading="gouraud")
time_text.set_text(f"t = {t:.2f}")
anim = animation.FuncAnimation(fig, snapshot, frames=linspace(0, 2, 81))
anim.save("advdiff-2d.mp4", fps=30)
close()Example 13.2.4
We start with the discretization and initial condition.
m, n = 40, 42
x, Dx, Dxx = FNC.diffcheb(m, [-2, 2])
y, Dy, Dyy = FNC.diffcheb(n, [-2, 2])
mtx, X, Y, _, _, _ = FNC.tensorgrid(x, y)
U0 = mtx(lambda x, y: (x + 0.2) * exp(-12 * (x**2 + y**2)))
V0 = zeros(U0.shape)We need to define chopping and extension for the component. This looks the same as in Example 13.2.3.
def extend(U):
UU = zeros((m+1, n+1))
UU[1:-1, 1:-1] = U
return UU
def chop(U):
return U[1:-1, 1:-1]_, _, _, vec_v, unvec_v, _ = FNC.tensorgrid(x, y)
_, _, _, vec_u, unvec_u, _ = FNC.tensorgrid(x[1:-1], y[1:-1])
N = (m-1) * (n-1) # number of interior points
def pack(U, V):
return hstack([vec_u(chop(U)), vec_v(V)])
def unpack(w):
U = extend(unvec_u(w[:N]))
V = unvec_v(w[N:])
return U, VWe can now define and solve the IVP. Since this problem is hyperbolic, a nonstiff integrator is faster than a stiff one.
def dw_dt(t, w):
U, V = unpack(w)
dU_dt = V
dV_dt = Dxx @ U + U @ Dyy.T
return pack(dU_dt, dV_dt)
from scipy.integrate import solve_ivp
sol = solve_ivp(dw_dt, (0, 4), pack(U0, V0), method="RK45", dense_output=True)
U = lambda t: unpack(sol.sol(t))[0]fig, ax = subplots()
obj = ax.pcolormesh(X, Y, U(0), vmin=-0.1, vmax=0.1, cmap="RdBu", shading="gouraud")
time_text = ax.text(0.05, 0.9, '', transform=ax.transAxes)
ax.set_xlabel("$x$"), ax.set_ylabel("$y$")
ax.set_aspect("equal")
ax.set_title("Wave equation in 2d")
def snapshot(t):
global obj
obj.remove()
obj = ax.pcolormesh(X, Y, U(t), vmin=-0.1, vmax=0.1, cmap="RdBu", shading="gouraud")
time_text.set_text(f"t = {t:.2f}")
anim = animation.FuncAnimation(fig, snapshot, frames=linspace(0, 4, 91))
anim.save("wave-2d.mp4", fps=30);
close()13.3 Laplace and Poisson equations¶
Example 13.3.1
A = array([[1, 2], [-2, 0]])
B = array([[1, 10, 100], [-5, 5, 3]])
print("A:")
print(A)
print("B:")
print(B)A:
[[ 1 2]
[-2 0]]
B:
[[ 1 10 100]
[ -5 5 3]]
Applying the definition manually, we get
A_kron_B = vstack([ hstack([A[0, 0] * B, A[0, 1] * B]), hstack([A[1, 0] * B, A[1, 1] * B]) ])
print(A_kron_B)[[ 1 10 100 2 20 200]
[ -5 5 3 -10 10 6]
[ -2 -20 -200 0 0 0]
[ 10 -10 -6 0 0 0]]
But it makes more sense to use kron from NumPy, or the scipy.sparse version when sparsity is to be preserved.
kron(A, B)array([[ 1, 10, 100, 2, 20, 200],
[ -5, 5, 3, -10, 10, 6],
[ -2, -20, -200, 0, 0, 0],
[ 10, -10, -6, 0, 0, 0]])Example 13.3.2
We make a crude discretization for illustrative purposes.
m, n = 5, 6
x, Dx, Dxx = FNC.diffmat2(m, [0, 3])
y, Dy, Dyy = FNC.diffmat2(n, [-1, 1])
mtx, X, Y, vec, unvec, is_boundary = FNC.tensorgrid(x, y)Here is a look at the matrix we called (the discrete Laplacian), before any modifications are made for the boundary conditions. The combination of Kronecker products and finite differences produces a characteristic sparsity pattern.
import scipy.sparse as sp
Dxx = sp.lil_matrix(Dxx)
Dyy = sp.lil_matrix(Dyy)
Ix = sp.eye(m+1)
Iy = sp.eye(n+1)
A = sp.kron(Iy, Dxx) + sp.kron(Dyy, Ix)
spy(A)
title("Matrix before imposing BC");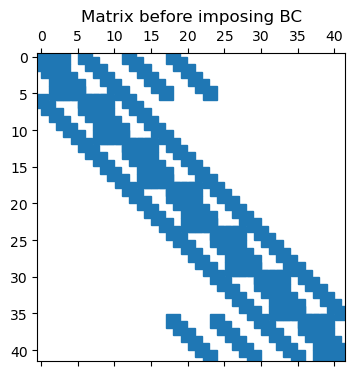
The number of equations is equal to , which is the total number of points on the grid.
N = (m+1) * (n+1)We now use the final output from Algorithm 13.2.1, which is a Boolean array indicating where the boundary points lie in the grid.
spy(is_boundary)
title("Boundary points");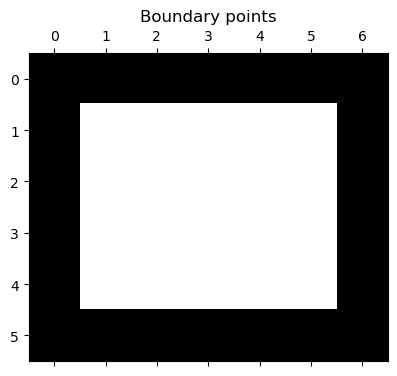
In order to impose Dirichlet boundary conditions, we use the boundary indicator to index into the rows of the system.
Tip
Changing rows of a sparse array requires that the operands be in a particular sparse representation called lil. The conversion isn’t done automatically because it can be slow and you are encouraged to avoid it when possible. We’re just trying to keep things conceptually simple here.
I = sp.eye(N, format="lil")
idx = vec(is_boundary)
A = A.tolil()
A[idx, :] = I[idx, :]; # Dirichlet conditions
spy(A)
title("Matrix with Dirichlet BC imposed");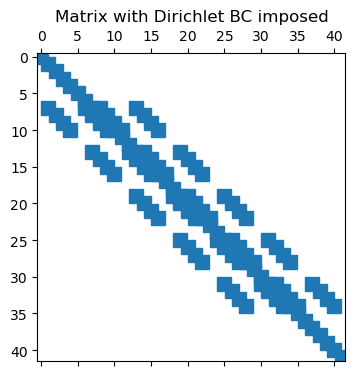
Next, we evaluate on the grid to get the forcing vector of the linear system, and then modify the boundary rows to hold the boundary values—in this case, zero.
f = lambda x, y: x**2 - y + 2
b = vec(mtx(f))
b[idx] = 0Now we can solve for and reinterpret it as the matrix-shaped , the solution on our grid.
from scipy.sparse.linalg import spsolve
u = spsolve(A.tocsr(), b)
U = unvec(u)
with printoptions(precision=4, suppress=True):
print(U)[[ 0. 0. 0. 0. 0. 0. 0. ]
[ 0. -0.5512 -0.8252 -0.8791 -0.7476 -0.451 0. ]
[ 0. -0.9109 -1.3939 -1.5092 -1.3003 -0.7928 0. ]
[ 0. -1.1788 -1.7957 -1.9513 -1.7021 -1.0607 0. ]
[ 0. -1.1409 -1.6859 -1.8182 -1.6083 -1.0407 0. ]
[ 0. 0. 0. 0. 0. 0. 0. ]]
Example 13.3.3
First we define the problem on .
f = lambda x, y: -sin(3 * x * y - 4 * y) * (9 * y**2 + (3 * x - 4) ** 2)
g = lambda x, y: sin(3 * x * y - 4 * y)
xspan = [0, 1]
yspan = [0, 2]Here is the finite-difference solution.
U, X, Y = FNC.poissonfd(f, g, 50, xspan, 80, yspan)Source
pcolormesh(X.T, Y.T, U.T, cmap="viridis")
xlabel("$x$"), ylabel("$y$"), axis("equal")
colorbar(), title("Solution of Poisson's equation");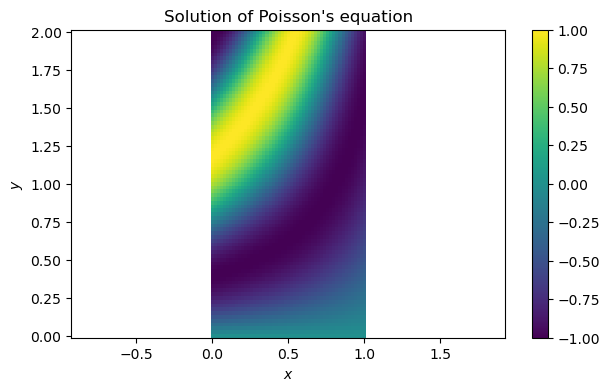
Since this is an artificial problem with a known solution, we can plot the error, which is a smooth function of and . It must be zero on the boundary; otherwise, we have implemented boundary conditions incorrectly.
error = g(X, Y) - U # because we set up g as the exact solution
M = max(abs(error))
pcolormesh(X.T, Y.T, error.T, vmin=-M, vmax=M, cmap="RdBu")
xlabel("$x$"), ylabel("$y$"), axis("equal")
colorbar(), title("Error");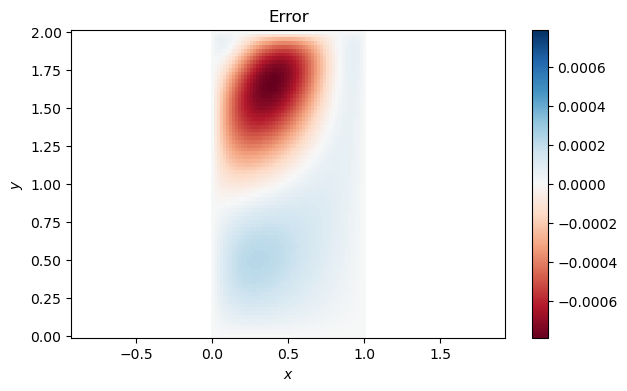
13.4 Nonlinear elliptic PDEs¶
Example 13.4.2
All we need to define are from (13.4.2) for the PDE, and a trivial zero function for the boundary condition.
lamb = 1.5
phi = lambda x, y, u, ux, uxx, uy, uyy: uxx + uyy - lamb / (u + 1)**2
g = lambda x, y: 0Here is the solution for , .
u = FNC.elliptic(phi, g, 15, [0, 2.5], 8, [0, 1])
print(f"solution at (2, 0.6) is {u(2, 0.6):.7f}")solution at (2, 0.6) is -0.2264594
Source
x = linspace(0, 2.5, 90)
y = linspace(0, 1, 60)
mtx, X, Y, _, _, _ = FNC.tensorgrid(x, y)
U = mtx(u)
pcolormesh(X.T, Y.T, U.T, cmap="viridis")
xlabel("$x$"), ylabel("$y$"), axis("equal")
colorbar()
title("Solution of the MEMS equation in 2d");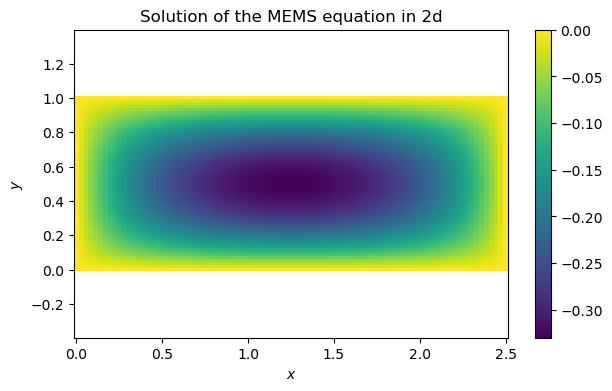
In the absence of an exact solution, how can we be confident that the solution is accurate? First, the Levenberg iteration converged without issuing a warning, so we should feel confident that the discrete equations were solved. We can check the boundary values easily. For example,
err = norm(u(x, 0) - g(x, 0), inf)
print(f"max error on bottom edge: {err:.2e}")max error on bottom edge: 9.56e-23
Assuming that we encoded the PDE correctly, the remaining source error is truncation from the discretization. We can estimate that by refining the grid a bit and seeing how much the numerical solution changes.
x_test = linspace(0, 2.5, 6)
y_test = linspace(0, 1, 6)
mtx_test, X_test, Y_test, _, _, _ = FNC.tensorgrid(x_test, y_test)
with printoptions(precision=7, suppress=True):
print(mtx_test(u))[[ 0. 0. 0. 0. 0. 0. ]
[ 0. -0.1479641 -0.2264594 -0.2264594 -0.1479641 0. ]
[ 0. -0.1958612 -0.3059492 -0.3059492 -0.1958612 0. ]
[ 0. -0.1958612 -0.3059492 -0.3059492 -0.1958612 0. ]
[ 0. -0.1479641 -0.2264594 -0.2264594 -0.1479641 0. ]
[-0. 0. 0. 0. 0. 0. ]]
u = FNC.elliptic(phi, g, 25, [0, 2.5], 14, [0, 1])
with printoptions(precision=7, suppress=True):
print(mtx_test(u))[[ 0. -0. -0. -0. 0. 0. ]
[-0. -0.1479584 -0.226453 -0.226453 -0.1479584 0. ]
[ 0. -0.195861 -0.3059293 -0.3059293 -0.195861 0. ]
[-0. -0.195861 -0.3059293 -0.3059293 -0.195861 -0. ]
[-0. -0.1479584 -0.226453 -0.226453 -0.1479584 -0. ]
[-0. -0. -0. 0. -0. 0. ]]
The original solution seems to be accurate to about four digits.
Example 13.4.3
phi = lambda x, y, u, ux, uxx, uy, uyy: 1 - ux - 2*uy + 0.05 * (uxx + uyy)
g = lambda x, y: 0
u = FNC.elliptic(phi, g, 32, [-1, 1], 32, [-1, 1])x = y = linspace(-1, 1, 70)
mtx, X, Y, _, _, _ = FNC.tensorgrid(x, y)
U = mtx(u)
pcolormesh(X.T, Y.T, U.T, cmap="viridis")
xlabel("$x$"), ylabel("$y$"), axis("equal")
colorbar()
title("Steady advection–diffusion");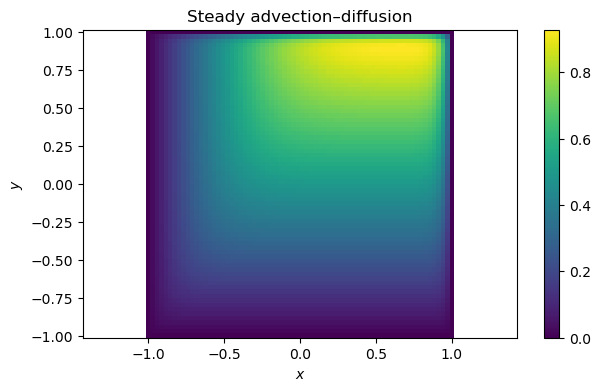
Example 13.4.4
The following defines the PDE and a nontrivial Dirichlet boundary condition for the square .
phi = lambda x, y, u, ux, uxx, uy, uyy: u * (1 - u**2) + 0.05 * (uxx + uyy)
g = lambda x, y: tanh(5 * (x + 2*y - 1))We solve the PDE and then plot the result.
u = FNC.elliptic(phi, g, 36, [0, 1], 36, [0, 1])Source
x = y = linspace(0, 1, 70)
mtx, X, Y, _, _, _ = FNC.tensorgrid(x, y)
U = mtx(u)
pcolormesh(X.T, Y.T, U.T, cmap="viridis")
xlabel("$x$"), ylabel("$y$"), axis("equal")
colorbar(), title("Steady Allen–Cahn equation");